Hugging Face's LeRobot team released an open-source bipedal robot you can print and build yourself. The current platform runs about $2,500 in parts, per the team's blog post, though that figure shifts with sourcing, shipping, and taxes.
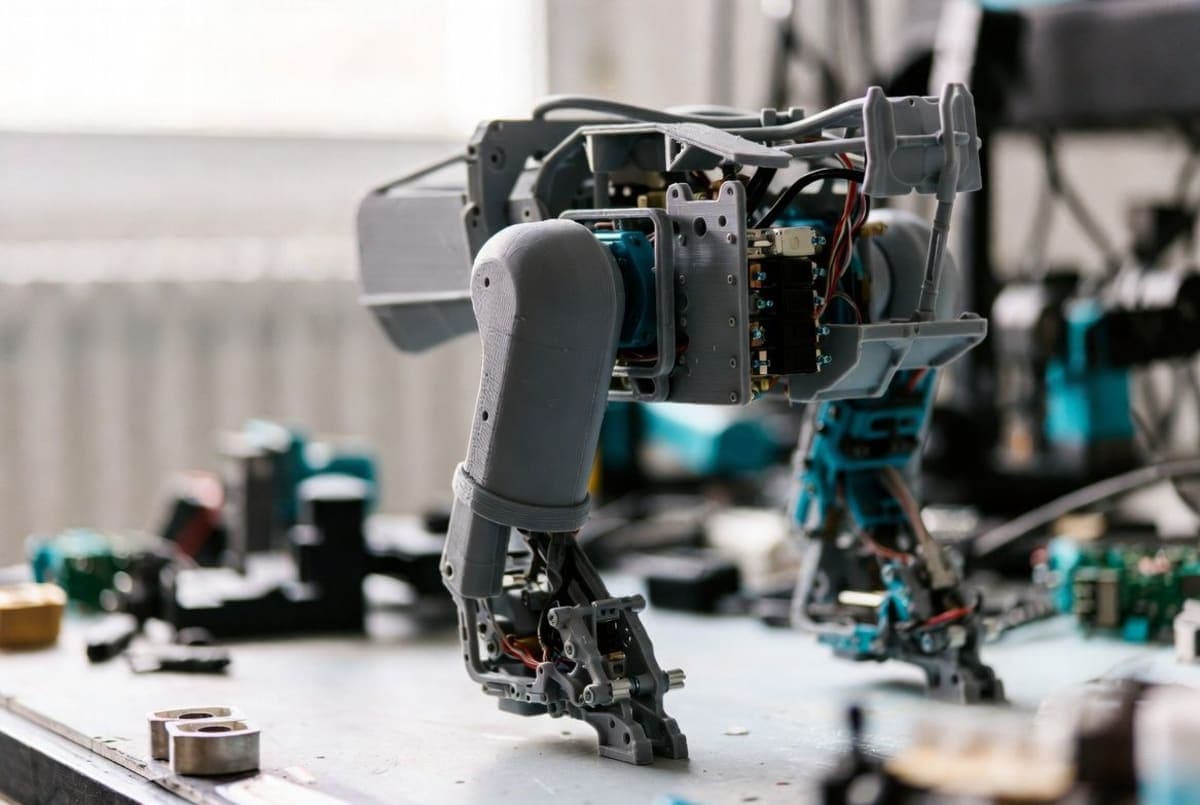
The robot isn't finished. Right now it's a pair of legs. The bipedal lower body is the only hardware target in this first release, with upper-body integration and whole-body motor skills sitting on the roadmap.
What ships is a full stack rather than a single model. The GitHub repo bundles 3D-printable parts, a bill of materials, simulation assets, calibration and control tools, sim-to-real identification pipelines, and MJLab training environments for locomotion policies. The team calls the platform experimental and warns that running learned controllers on real hardware still needs careful bring-up: low-gain testing, safety checks, a reliable power cutoff.
The 3D-printing choice matters for one practical reason. Break a structural part, reprint it, keep going. No waiting on spare parts to resume locomotion research.
An early standing policy already runs on the physical robot, according to the team, though what they show is a demo clip, not a benchmark. The release went live May 21.
Bottom Line
The full hardware and software stack is on GitHub now, but this release covers only the legs; upper-body integration is still on the roadmap.
Quick Facts
- Build cost: about $2,500 in parts (company-reported)
- Released May 21, 2026
- Current hardware target: bipedal lower body only
- Stack includes 3D-printable parts, simulation, sim-to-real tools, MJLab training environments
- Built by Hugging Face's LeRobot team



